Шаговый двигатель в станке с ЧПУ: виды, плюсы, минусы, кандидатуры
Одно из основных различий современного станка с ЧПУ от «традиционных» моделей с ручным управлением – отсутствие кинематической связи меж механизмами, отвечающими за перемещение рабочих органов и вращение шпинделя. Раздельный привод дозволяет отрешиться от использования многоступенчатых коробок передач, механических делительных головок, доверить сложные расчеты компу. Но чтоб перемещения были точными, а станок постоянно осознавал, в которой точке находится режущий инструмент в текущий момент времени, привод обязан иметь полностью определенные характеристики. В механизмах станка с ЧПУ идеальнее всего с этими задачками управляются шаговые движки: малогабаритные «послушливые» в управлении и сравнимо дешевые.
В данной нам статье мы поведаем о работе этих устройств, попытаемся отыскать их недочеты и подобрать другие варианты.
Как работает шаговый двигатель?
Более принципиальная конструктивная изюминка шагового мотора – очевидно выраженные магнитные полюса. На статоре их роль играют сердечники обмоток. Ротор смотрится как зубчатое колесо: выступы на его поверхности – это тоже полюса (неизменных магнитов). Благодаря таковой конструкции шаговый двигатель способен совершать дискретные угловые перемещения с остановкой в определенном положении. Связанный с ним через передачу винт-гайка узел станка совершает данное линейное перемещение.
Управляющий сигнал для шагового мотора представляет собой последовательность импульсов. Их количество кратно числу шагов, которые совершает ротор. Система управления станка понимает, сколько импульсов было послано на двигатель, и может посчитать текущее положение исполнительного механизма.
Плюсы и недочеты
У шаговых движков широкий список преимуществ. Самые принципиальные из их:
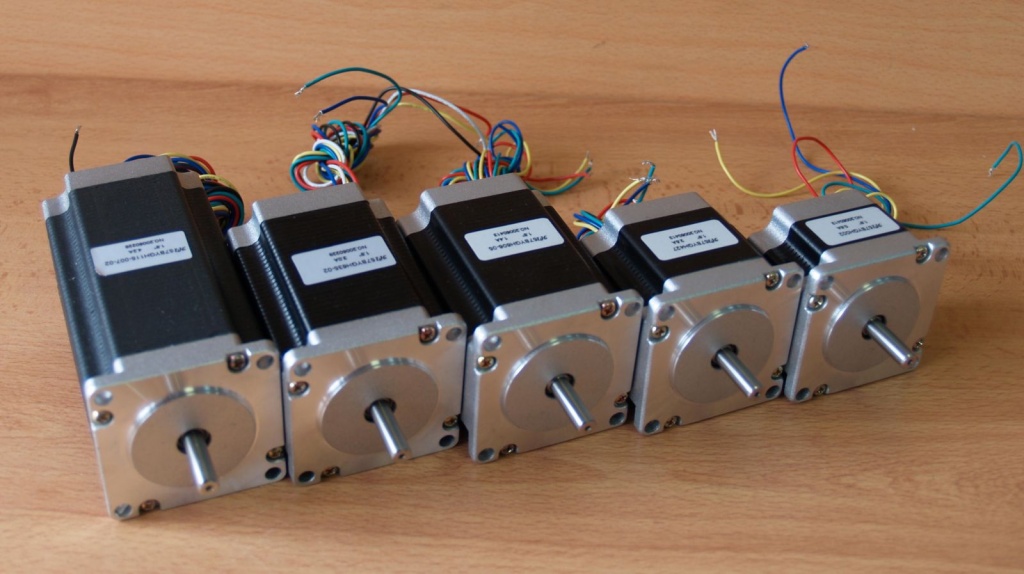
- Доступная стоимость. Такие приводы используются не только лишь в промышленных станках, да и в бытовой технике. К примеру, на маломощные самодельные станки нередко устанавливают шаговые движки, снятые с принтеров.
- Надежность. Благодаря отсутствию щеток и применению подшипников с лишним рабочим ресурсом вывести из строя шаговый двигатель довольно трудно. Перегрузки приводят к пропуску шагов, но не повреждают двигатель.
- Высочайшая быстроту отклика на управляющий сигнал. Старт, торможение и реверсирование происходят фактически одномоментно из-за того, что наибольший момент двигатель развивает при скоростях, близких к нулю.
Есть у таковых приводов и недочеты:
- На обмотках мотора постоянно есть напряжение, другими словами он повсевременно потребляет энергию.
- Вращающий момент зависит от частоты вращения, и на больших скоростях он существенно падает.
- Эффект резонанса — падение момента на неких частотах вращения. При чем резонансная частота непостоянна и зависит от величины перегрузки.
- При пропуске шагов система ЧПУ не сумеет верно найти положение исполнительного механизма, если шаговый привод работает без оборотной связи.
Типы шаговых приводов
Существует два типа шаговых приводов:
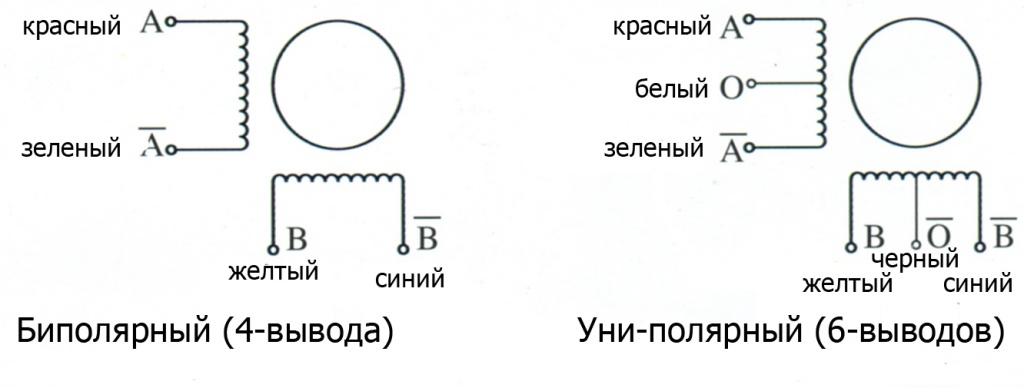
- Униполярные. Обмотки статора имеют от 5 до 8 выводов. Двигатель врубается в работу средством их коммутации с помощью простого драйвера с 4-мя ключами.
- Биполярные. В таком моторе всего 4 вывода, и для конфигурации характеристик магнитного поля им нужна наиболее непростая система управления.
Биполярные движки развивают огромные моменты на валу, чем униполярные, при сравнимых массово-габаритных свойствах, потому их в станках с ЧПУ можно узреть существенно почаще.
Как выбрать шаговый двигатель для ЧПУ станка?
Самостоятельный выбор шагового мотора для ЧПУ станка привода — работа непростая и требующая четких расчетов. Он должен преодолеть силу трения в ШВП либо передаче винт-гайка, инерцию портала и рабочую нагрузку, которая зависит от параметров обрабатываемой детали и режима резания. Также необходимо учитывать геометрические характеристики присоединительного фланца, вала и корпуса. Принципиальный момент – анализ графика зависимости вращающего момента от частоты вращения. Конкретно тут ошибки приводят к пропуску шагов.
Тем, кто все таки отважился собрать станок без помощи других, мы советуем поглядеть свойства приводов готовых моделей, близких по размерам и поставленным задачкам.
Другие варианты
Единственный соперник шагового мотора в ЧПУ станке — сервомотор. Его установка просит реализации наиболее сложной схемы управления с оборотной связью (энкодером). Есть у него и остальные недочеты. Выбор меж сервоприводом и шаговым движком для ЧПУ станка вызывает много вопросцев у начинающих станочников и споров на форумах. Чтоб найти лучший состав привода, необходимо учитывать последующие причины:
- Стоимость. При твердых ограничениях в бюджете широкий выбор отсутствует в принципе, и считается, что шаговый двигатель существенно дешевле сервомотора. Но это справедливо для устройств маленьких типоразмеров. Чем больше мощность, тем меньше разница в стоимости, а у неких больших моделей стоимость моторов обоих типов сравнима.
- Массово-габаритные свойства станка. Чем больше станок, тем большая мощность нужна для перемещения рабочих органов. Склонность к резонансным явлениям посильнее проявляется у массивных шаговых движков, что может привести к пропуску шагов и понижению точности обработки. Для фрезерных станков с ЧПУ рекомендуется выбирать серводвигатели, если масса портала превосходит 50 кг.
- Сложность опции. Схемы приводов с оборотной связью требуют четкой наладки и высочайшей квалификации оператора. Если требуется самое обычное решение, хорошим выбором для станка с ЧПУ будет шаговый двигатель.
- Возможность перегрузок и заклинивания. Считается, что при заклинивании серводвигатель непременно выйдет из строя. Это не совершенно так. Если станок настроен верно, драйвер не отправит сигнал на повторную отработку перемещения, выполнение программки закончится, и стойка перейдет в режим ожидания до вмешательства оператора либо наладчика. Шаговые движки при перегрузке могут пропустить пару шажков. Из-за отсутствия оборотной связи СЧПУ не выяснит о этом и продолжит отсчитывать шаги далее. Пропуск нескольких шагов при краткосрочном заклинивании – это бракованная деталь на выходе. Утрата шагов также вероятна при наружных вибрационных действиях и ударах.
- Скорость перемещения. В мощных ЧПУ станках с шаговыми движками скорость движения портала обычно не превосходит 9 м/мин. Если материал заготовки и режущий инструмент разрешают назначить режим обработки на наиболее больших скоростях, то мотор будет «узеньким местом», ограничивающим производительность. Этот же портал с приводом от серводвигателя аналогичного типоразмера сумеет развить скорость до 60 м/мин.
- Рабочие убыстрения. Лишний разгон шагового мотора безизбежно приведет к пропуску шагов. Если предполагается работа на больших убыстрениях, лучше выбрать сервомотор.
- Перегрузка на передачу в момент остановки. В томных станках с ЧПУ шаговые движки нередко устанавливают на механизмы вертикального перемещения шпинделя. Ротор затормаживается магнитными силами опосля остановки. Сервопривод в остановленном положении совершает колебания, что весьма не нужно. Шаговый двигатель отлично ведет себя в механизмах поворота заготовки (4-ой оси), кода требуется задерживать ее в стационарном положении.
Какие движки используются в станках MULTICUT?
Надежность конструкции – главный аспект, по которому инженеры компании MULTICUT оценивают комплектующие для станков от посторониих производителей. В выборе движков для устройств перемещения не допускаются компромиссы в качестве.
По дефлоту на все станки инсталлируются шаговые приводы MIGE и контроллеры YAKO. Базисная комплектация выбрана исходя из пожеланий заказчиков и анализа оборудования соперников. Приводы показывают высочайшие вращающие моменты и динамику. Станок размеренно работает на убыстрениях до 1,5 м/с 2 . Движки работают в микрошаговом режиме с точностью 300 шагов на оборот. В сочетании с редуктором с передаточным отношением 5 аппаратная точность позиционирования составляет 6 мкм. «Шаговость» никак не отражается даже на самых маленьких деталях.
В качестве функции заказчику предлагаются сервоприводы DELTA серии ASDA-B2. Эти движки различаются хорошей маневренностью: положение, момент и скорость могут регулироваться сигналом задания. По динамическим чертам эти моторы существенно превосходят наиболее дорогие аналоги. Разгон от -3000 до + 3000 оборотов за минуту на холстом перемещении составляет около 10 мс. В тех моделях, которые мы устанавливаем на станки, есть тормозной резистор. В энкодер с разрешением 160000 импульсов на оборот встроен цифровой модуль управления, который дозволяет оперативно выполнить конфигурирование мотора.
Если станок рассчитан на работу в высоконагруженных режимах, от него требуется не плохая производительность, то мы советуем выбирать сервоприводы ESTUN. Умственные силовые модули промышленного класса, применяемые в конструкции движков, разрешают им выдерживать перегрузки по току, развивать высочайшие моменты во время запуска. Производитель воплотил функцию угнетения вибрации, сделал настройку обычный и комфортной, а двигатель — отзывчивым и четким в работе.
На настольные станки 500-й серии мы устанавливаем привода мощностью 200 Вт (на каждую ось). В базисной комплектации крупногабаритных моделей мощность шаговых движков составляет 400 Вт. Для всех серий станков в сервоисполнении мы хотим предложить моторы мощностью 0,75 и 1 кВт.
Чтоб получить консультации по вопросцам выбора и комплектации станков MULTICUT, позвоните по контактному телефону в вашем регионе.
Выбор шагового мотора
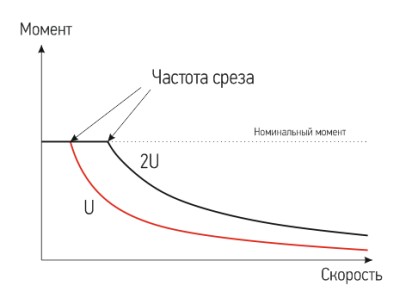
Шаговый двигатель — устройство с неизменной мощностью, если мощность найти как момент, умноженный на скорость. Это значит, что вращающий момент назад пропорционален скорости. Чтоб уяснить, почему мощность мотора не зависит от скорости, представим для себя безупречный шаговый двигатель.
В безупречном движке нет трения, его момент пропорционален амперо-виткам обмоток и единственной электронной чертой является индуктивность. Индуктивность L охарактеризовывает способность обмотки припасать энергию в магнитном поле. Индуктивности владеют свойством индуктивного сопортивления, т.е. сопротивления переменному току, которое тем больше, чем резвее изменяется ток, а означает, индуктивное сопротивление растет совместно со скоростью вращения мотора. По закону Ома ток прямо пропорционален напряжению и назад пропорционален полному сопротивлению, откуда следует, что ток обмотки миниатюризируется при увеличении скорости вращения. Т.к. момент пропорционален амперо-виткам, а ток назад пропорционален скорости, то момент также будет назад пропорционален скорости. Т.е. при нулевой скорости момент стремится к бесконечности, при увеличении скорости момент(и ток) начинает стремиться к нулю.
Электрически, настоящий двигатель различается от безупречного в главном ненулевым сопротивлением обмотки, также ферромагнитными составляющими, которым свойствоенно насыщаться магнитным полем, что приводит к гистерезисным потерям и потерям на вихревые токи. Насыщение ограничивает момент, а вихревые токи и гистерезисные утраты вызывают нагрев мотора. Разглядим кривую зависимости вращающего момента шагового мотора от скорости.
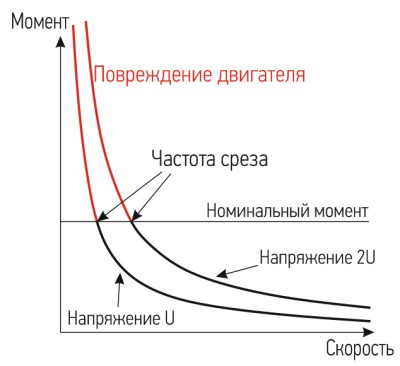
Как видно из графика, при скорости ниже определенного предела, момент, а как следует и ток, растут весьма стремительно, прямо до уровней, приводящих к повреждению мотора. Чтоб этого избежать, драйвер должен ограничивать нарастание тока до определенной величины. Так как момент пропорционален току, момент будет постоянен начиная с момента удержания до порогового значения скорости, а при скорости выше порога — ток будет ограничен индуктивностью обмоток.
В итоге, скорость-моментная черта безупречного мотора будет начинаться с отрезка, где момент неизменный, до точки, когда мотор не станет генерировать и потреблять реактивную мощность. Настоящий шаговый двигатель владеет потерями, которые изменяют безупречную скорость-моментную характеристику. В особенности велик вклад момента от зубцовых гармоник магнитного поля(его время от времени указывают в документации на двигатель). Утраты в движке есть постоянно, и чем резвее вращается вал шагового мотора, тем больше утраты, и их также нужно вычитать из безупречной свойства.
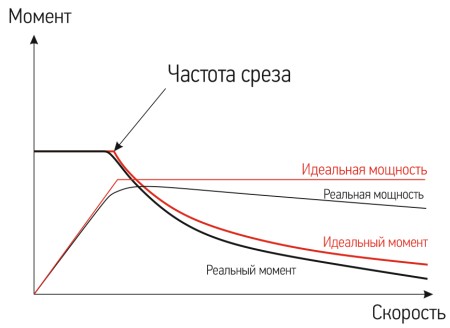
Направьте внимание, как настоящая мощность падает совместно с ростом скорости, в том числе и на отрезке «постоянной мощности». Скругление на переходной точке обосновано переходным действием в цепи — драйвер равномерно преобразуется из источника тока в источник напряжения.
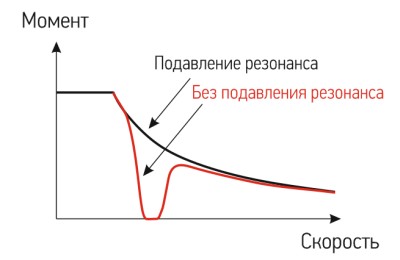
Резонанс на средних частотах
Шаговый двигатель очень подвержен резонансу, являясь по факту аналогом маятника «подвешенный на пружине груз», где грузом является ротор, а пружиной — магнитное поле, и имеет частоту собственных колебаний, зависящую от силы тока и инерции ротора. В момент, когда разность фаз момента и скорости добивается величины 180 град., возникает резонанс – изменение магнитного поля начинает совпадать со скоростью, и скорость ротора при позиционировании на новейший шаг становится очень велика. При резонансе значимая часть энергии магнитного поля уходит на преодоление инерции ротора при колебании около положения равновесия, что выражается в значимом падении вращающего момента на валу. Скопленная кинетическая энергия ротора расходуется при появлении резонанса приблизительно за 1-10 сек, потому разогнать двигатель можно, пройдя зону резонанса без последствий, но работать сколь-нибудь длительное время не получится – вал остановится. Для устранения этого явления в драйверах употребляются разные антирезонансные методы.
Мощность мотора
Выходная мощность мотора (скорость×момент) пропорциональна напряжению, деленному на квадратный корень из индуктивности. Если мы увеличим в два раза напряжение ШИМ, то получим другую кривую СМХ, лежащую выше, и мощность на участке неизменной мощности вырастет в два раза. С током другая картина. Набросок ниже указывает, что будет при выставлении на драйвере тока в 2 раза больше номинального для мотора. Мотор начинает выделять в 4 раза больше тепла, а момент на низких оборотах возрастает наименее чем в 2 раза из-за насыщения сердечников обмоток.
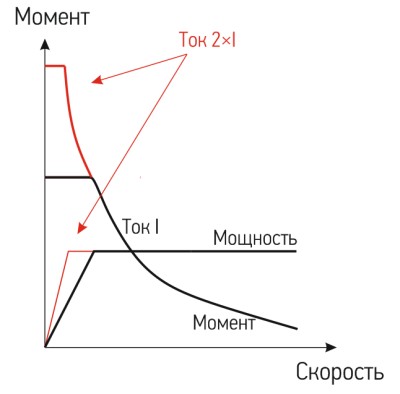
Как можно созидать, мощность не возрастает совсем. Постоянно рекомендуется выставлять ток на драйвере равным номинальному значению для мотора. Это в том числе понизит вибрации на низких частотах, сделает лучше свойства хода в микрошаговом режиме.
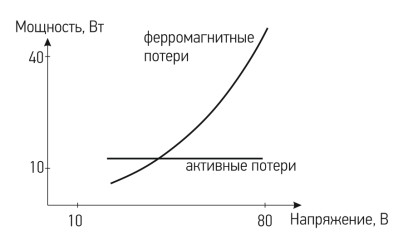
Напряжение питания и нагрев мотора
Главные предпосылки нагрева мотора: утраты на сопротивлении обмоток и ферромагнитные утраты. 1-ая часть всем знакома – это термическая энергия, выделяющяяся на активном сопротивлении проводов обмоток, равная I2R. Вклад этого слагаемого велик лишь когда двигатель находится в режиме удержания, и резко миниатюризируется с возрастанием скорости мотора. Ферромагнитными потерями назваются утраты на токи Фуко и гистерезисные утраты. Они зависят от конфигурации тока и, как следует, от питающего напряжения, и выделяются в виде тепла. Как было сказано выше, мощность мотора вырастает прямо пропорционально напряжению, но ферромагнитные утраты тоже вырастают, при этом, в отличие от мощности, — нелинейно, что и ограничивает наибольшее напряжения, которое можно употреблять для драйвера. Можно сказать, что наибольшая нужная мощность шагового мотора определяется количеством тепла, которое может на нем неопасно выделяться. Потому не следует стараться выдавить полкиловатта из мотора 57 серии, подключив драйвер к источнику в 10 кВ – у напряжения есть разумные пределы. Их можно рассчитывать различными методами. Эмпирически было получено несколько оценок сверху для наибольшего питающего напряжения ШИМ-драйвера: оно не обязано превосходить номинальное напряжение обмоток наиболее чем в 25 раз либо величину 32√ L, где L – индуктивность обмотки.
Для наглядности ниже показан график, показывающий ферромагнитные утраты для мотора с номинальными чертами 4 А, 3 В.
Коротко о мощности шагового мотора
Выбор мотора и питающего напряжения полностью зависят от задач. В эталоне, двигатель должен выдавать достаточный момент на наибольшей планируемой скорости. Нужно различать момент от мощности мотора: большенный момент на низких скоростях не значит, что двигатель мощнейший. Выходная мощность – иной, наиболее принципиальный параметр, её приблизительно можно оценить по кривой скорости-момента. На теоретическом уровне, наибольшая мощность, которую можно размеренно получать с драйвера, питаемого напряжением 80 В и выходным током 7 А приблизительно 250 Ватт(1/3 л.с.), в действительности же для этого будет нужно 2 либо 3 мотора NEMA 34.
О ЧЕМ ГОВОРЯТ ХАРАКТЕРИСТИКИ ШАГОВОГО ДВИГАТЕЛЯ
Если вы опустили все, написанное выше, либо прочли, но не достаточно что сообразили, данная глава поможет разобраться, как перейти к практической части. Несколько слов о размере мотора. Развитие производства шаговых движков достигнуло огромных фурроров, и сейчас шаговые движки 1-го размера различных производителей владеют весьма похожими чертами. Конкретно размер мотора задает рамки, в каких может изменяться его основная черта — кривая скорости-момента. Индуктивность обмотки указывает, как крута будет кривая СМХ при схожем напряжении питания драйвера с ШИМ: если мы возьмем 2 мотора индентичного размера с разной индуктивностью, и будем управлять ими одним драйвером с одним и этим же питающим напряжением, приобретенные кривые СМХ будут различаться крутизной.
Большая индуктивность потенциально дает для вас возможность получить больший вращающий момент, но чтоб произвести такую конверсию, будет нужно драйвер с огромным напряжением питания — тогда кривая СМХ поднимется ввысь пропорционально повышению напряжения. На практике практически все конторы создают моторы 1-го размера в 2-ух исполнениях — «медленный» и «быстрый», с большенный и малой индуктивностью. При этом «быстрые» модели пользуются большей популярностью — для их на больших оборотах требуется наименьшее напряжение, а означает наиболее дешевенькие драйверы и источник питания. А если вдруг не хватает мощности — можно взять двигатель побольше. «Медленные» модели остаются для специфичных применений — в вариантах, когда от шагового привода не требуется огромных скоростей, нужен большенный момент удержания и т.п. Ток обмотки косвенно связан с вращающим моментом, но в главном он гласит о том, какой драйвер необходимо будет подобрать к этому движку — он должен быть способен выдавать конкретно таковой уровень тока. Напряжения питания обмотки указывает, какое неизменное(не ШИМ) напряжение можно подавать на обмотку — таково значение напряжения, применяемое драйверами неизменного напряжения. Оно понадобится при вычислении очень допустимого напряжения питания драйвера с ШИМ, и тоже косвенно соединено с наибольшим вращающим моментом.
АЛГОРИТМ ПОДБОРА ШАГОВОГО ДВИГАТЕЛЯ
Так как выбрать двигатель? Зависит от того, какими вы данными обладаете. По большенному счету, выбор мотора сводится к выбору 4 вещей — производителя, вида мотора, размера и индуктивности. 1-ый параметр поддается оценке с трудом — не достаточно у кого репрезентативная подборка образцов от различных поставщиков. Что касается вида мотора, мы советуем постоянно, когда есть неопределенность в выборе, употреблять биполярные шаговые движки с 4 выводами и малой индуктивностью. Т.е. выбор в главном заключается в выборе размера мотора(в границах 1-го размера свойства движков с одной индуктивностью практически всех производителей фактически совпадают). Для выбора определенной модели можно употреблять последующий метод:
- Высчитайте наивысшую скорость вращения V в о/сек, которую желаете получить от привода, и момент M, который нужно получить от него на данной нам скорости(закладывайте в это значение припас в 25-40%).
- Переведите скорость вращения в частоту полных шагов PPS, для обычного мотора с шагом 1.8 град PPS = 200 * V.
- Изберите приблизительно пригодный на 1-ый взор размер мотора, из числа доступных моделей этого размера изберите двигатель с не самой большенный индуктивностью.
- Воспользуйтесь кривой СМХ, приводимой производителем, найдите на ней ваше значение PPS. Сверьтесь, достаточен ли момент, обозначенный на кривой.
- Если момент, обозначенный на кривой очень мал, разглядите двигатель размером побольше, если очень велик — размером гораздо меньше.
Но, нередко этот метод дает неправильные результаты из-за огромного количества причин и допущений при расчете момента. Просто можно получить, что для управления маленьким портальным фрезером с порталом весом 15 кг вдруг потребуются движки ST86-114. Почаще употребляют эмпирические методы, и они оказываются поточнее. Один из таковых методов — определение движков по весу портала и размеру рабочего поля. К примеру, выбор шагового мотора для горизонтальной передачи(оси X и Y) можно выполнить исходя из веса подвижной части, передачи, направляющих и материалов, планируемых к обработке. Для портальных станков традиционной компоновки, с передачей ШВП, шагом 5 мм на оборот, для обработки дерева и пластика, скорость холостого хода до 4000 мм/мин, в предположении, что направляющие оси без преднатяга и отъюстированы так, что подвижная часть прогуливается по ним без какого-нибудь сопротивления, можно посоветовать последующие значения:
- Вес подвижной части наименее 5 кг — двигатель серии PL42 либо аналогичный.
- Вес подвижной части 5-10 кг — двигатель PL57-56 либо аналогичный.
- Вес подвижной части 10-23 кг — двигатель PL57-76 либо аналогичный.
- Вес подвижной части 23-35 кг — двигатель PL86-80 либо аналогичный.
- Вес подвижной части 35-50 кг — двигатель PL86-114 либо аналогичный.
Вместе с этими оценками можно употреблять оценки для размеров рабочего поля: Рабочее поле 0,1-0,5 кв.м. — движки PL57-76 либо подобные. Рабочее поле 0,5-1 кв.м. — движки PL86-80 либо подобные. Рабочее поле 1-1,5 кв.м. — движки PL86-114 либо подобные. Если свойства Вашего станка находятся в пограничных интервалах, скажем, вес портала 23 кг, поле около 0,5 кв. м., стоит употреблять доп оценочные способы. Очередной всераспространенный подход заключается в анализе готовых станков на рынке, которые близки к конструируемому по размерам и чертам — испытанная система значит, что движки уже подобраны хорошим образом, и можно взять их свойства за базу.
И крайнее, что можно посоветовать — обратиться за консультацией к опытным спецам.
Избираем шаговый двигатель для станков с ЧПУ верно: главные аспекты
Шаговый двигатель для станка с ЧПУ — база устройства. Потому к его выбору стоит подойти со всей ответственностью. Грамотный выбор мотора — залог долговременной и резвой работы устройства.
Что такое шаговый двигатель для ЧПУ станка и для чего же нужен?

Шаговый двигатель — это машинка, модифицирующая электронную энергию (она поступает из электросети) в механическую. Происходит это благодаря выполнению дискретных перемещений ротора. Опосля всякого деяния динамической части ее положение фиксируется.
Все передвижения в отдельности имеют схожую величину и образуют полный оборот (цикл).
Какие шаговые движки необходимы для ЧПУ-станка
Разновидность мотора не наименее принципиальна, чем его технические свойства. Любой вид имеет свои индивидуальности.
- Биполярные. Их почаще всего употребляют на станках с ЧПУ. Основное преимущество разновидности — возможность установить новейший драйвер, если предшествующий вышел из строя. При всем этом даже на малых оборотах сохранится высочайшее удельное сопротивление.
- Трехфазные. Характеризуются высочайшей скоростью. Их выбирают в этом случае, если принципиальна конкретно скорость.
- Униполярные. Содержат в себе несколько разновидностей биполярных. Движки различаются друг от друга, а их подбор осуществляется зависимо от вида обмотки.
Как подобрать шаговый двигатель для сотворения ЧПУ-станка своими руками?

Подбор рационального мотора проводится на основании нескольких характеристик.
Индуктивность
Сперва вычисляют квадратный корень из индуктивности обмотки. Приобретенное число множится на 32. Итоговое значение сравнивается с напряжением источника, который питает драйвер. Эти характеристики не могут существенно различаться друг от друга.
Мотор будет работать очень звучно и перенагреваться в случае различия наиболее 30 %.
Высочайшая индуктивность помогает сохранить высочайший вращающий момент. Для мотора с высочайшей индуктивностью принципиально подобрать драйвер с огромным напряжением. Лишь так мотор сумеет всеполноценно работать.
Вращающий момент и скорость

Чтоб выбрать совершенно пригодный мотор, необходимо составить график скорости и вращающего момента (поточнее, зависимости 1-го параметра от другого). Готовый график указывает, соответствует ли избранный мотор данным техническим характеристикам.
Геометрические характеристики
Рекомендуется проанализировать последующие характеристики:
- Момент инерции роторов.
- Номинальный ток снутри фазы.
- Наибольшее число статического синхронизирующего момента.
- Общая черта сопротивления фаз омического типа.
ВАЖНО! При выбирании мотора особенное внимание уделяется фланцу, поперечнику вала и длине самого мотора.
Расчет шаговых движков для ЧПУ
Определение силы
Чтоб обусловиться с выбором мотора, необходимо просчитать его шаговые характеристики. К примеру, найти силу трения (она зависит от тех материалов, которые употребляются при работе на станке). Для расчета силы трения коэффициент трения множится на вес системы движения.
СПРАВКА! Для расчета инерции масса стола (она считается совместно с деталью) множится на нужный показатель убыстрения.
Полная сила сопротивления рассчитывается последующим образом: складываются силы резания, инерции и трения.
Расчет мощности
Мощность мотора рассчитывается по последующей формуле: F = ma. В данной формуле F — сила (ее определяют в ньютонах), которая прикладывается для приведения объекта в движение; m — масса объекта, a — необходимое убыстрение.
Расчет редукции оборотов

Эта черта высчитывается исходя из исходных оборотов привода и наибольшего показателя скорости, при которой {перемещается} стол.
Например, скорость равна 2000 мм/мин, а шаг винта передачи — 20 мм. Тогда редукция оборотов будет приравниваться 100 (2000/20).
Доп советы по выбору
Не считая всех перечисленных характеристик, стоит учесть к тому же последующие характеристики:
- Стоимость. Рекомендуется пристально изучить стоимость и свойства моторов. Время от времени при схожих параметрах разница в стоимости значимая. Также не стоит ориентироваться на известную фирму. Часто за имя производителя добавляется до 30 % цены.
- Сложность опции. Для начинающих юзеров станков с ЧПУ лучше выбирать механизм поординарнее. В сложном движке можно запутаться и сломать его.
- Предназначение устройства. От того, с какой целью будет применяться станок, зависит и черта мотора.
- Схема подключения. Она часто определяется от количества проводов.
- Наличие центр-крана. В этом случае обмотка идет вместе с проводами (3 шт.).
При выбирании шагового мотора стоит учесть все перечисленные выше характеристики. И тогда мотор прослужит намного подольше, и работать с таковым движком будет проще и резвее. При покупке стоит инспектировать на наличие промышленных браков.
Шаговой двигатель для ЧПУ: как обусловиться с выбором?
Шаговый двигатель пригодится хоть какому человеку, который собрался без помощи других собрать станок с ЧПУ. Основное – заблаговременно обусловиться со сферой внедрения устройства. Больших усилий и характеристик просит обработка цветных металлов, что раздельно учитывается при выбирании шагового мотора для ЧПУ.
- Какие аспекты определяющие для выбора?
- О разновидностях движков
- О усилиях резания
- По поводу резонанса при средних частотах
- О энкодерах и драйверах, подключениях
- Доп советы по выбору
- Что ещё учитывать?
- Заключение
Шаговый двигатель пригодится хоть какому человеку, который собрался без помощи других собрать станок с ЧПУ. Основное – заблаговременно обусловиться со сферой внедрения устройства. Больших усилий и характеристик просит обработка цветных металлов, что раздельно учитывается при выбирании шагового мотора для ЧПУ.
Какие аспекты определяющие для выбора?
Нужно держать в голове о том, что, по сопоставлению с обыкновенными движками, шаговые требуют наиболее сложных схем для управления. А критериев не так много.
- Параметр индуктивности.
1-ый шаг – определение квадратного корня из индуктивности обмотки. Итог позже умножаем на 32. Значение, приобретенное в качестве итога, позже требуется ассоциировать с напряжением источника, от которого питание идёт к драйверу.
Эти числа не должны различаться друг от друга очень очень. Мотор будет нагреваться и шуметь очень очень, если напряжение питания больше приобретенного значения на 30 и больше %. Если же он меньше, то, по мере нарастания скорости, вращающий момент убывает. Чем больше индуктивность – тем проще сохранить высочайший вращающий момент. Но для этого нужно подобрать драйвер, имеющий огромное напряжение питания. Лишь в этом случае шаговой двигатель работает нормально.
- График того, как вращающий момент и скорость зависят друг от друга.
Это дозволит осознать, как двигатель в принципе соответствует запросам и техническому заданию.

- Характеристики геометрического плана.
Особенное внимание рекомендуется уделить поперечнику вала, фланцу и длине мотора.
Не считая того, последующие характеристики так же рекомендуется пристально изучить:
- Наибольший статический синхронизирующий момент.
- Момент по инерции у роторов.
- Ток снутри фазы по номиналу.
- Общее сопротивление фаз омического типа.
О разновидностях движков
Для станка применяемая разновидность шаговых движков – параметр не наименее принципиальный, чем другие. Любая модель наделена своими чертами.
- Биполярные почаще всего используются вместе с ЧПУ.
Основное достоинство – возможность просто выбрать новейший драйвер, если старенькый выходит из строя. На малых оборотах при всем этом сохраняется высочайшее удельное сопротивление.
- Трёхфазные.
Для их свойственна высочайшая скорость. Животрепещущи, если конкретно данному параметру уделяют больше всего внимания в случае выбора.
- Униполярные.
Это некоторое количество видов биполярных движков, которые различаются друг от друга и подбираются зависимо от подключения обмотки.
Можно изучить готовые модели станков, предлагаемые текущим рынком. Благодаря схожему подходу выбор существенно упрощается. Основное – чтоб свойства и размеры подступали к создаваемому проекту.

О усилиях резания
Нередко обладатели задумываются, что на фрезу агрегата нужно очень давить, по другому она будет некорректно работать. Это заблуждение, которое не соответствует правде. Важнее всего то, как верно юзер задаёт характеристики рабочего процесса.
Не непременно воспользоваться сложными особыми формулами, чтоб осознать, как верно действовать. Это можно проверить и прямо нагими руками.
По поводу резонанса при средних частотах
Шаговые движки соединены с появлением мощного резонанса. На самом деле, они работают, как маятник с подвешенным на пружине грузиком. Роль груза делает ротор, а поле с магнитной энергией – пружина. Собственные колебания имеют частоту, определяемую по двум показателям:
- Инерция ротора.
- Сила тока.
Резонанс возникает, когда разность меж скоростью и фазностью момента добивается 180 градусов. Это значит, что находится соответствие скорости и конфигураций снутри магнитного поля. Движение становится резвым при позиционировании по новенькому шагу. Вращающий момент падает из-за того, что больше всего энергии уходит, чтоб преодолеть инерцию.
О энкодерах и драйверах, подключениях
Особые драйверы необходимы для того, чтоб управлять устройством. Они подключаются к LTP портам у индивидуальных компов. От программки идёт генерация сигналов, которые позже принимаются драйверами. Опосля чего же двигатель и получает определённые команды. Подача тока на обмотки дозволяет организовать работу всего устройства. Программное обеспечение упрощает контроль:
- По двигательной величине.
- Для скоростей.
- По траекториям.
Драйвер – это блок, отвечающий за управление всем движком. Формирование управляющего сигнала происходит при участии специального контроллера. Что подразумевает подключение к устройству сходу четырёх выводов шагового мотора. С блока питания идёт энергия, отрицательная и положительная, она и соединяется с моторами для предстоящей работы.
С контроллера ПУ сигналы идут к драйверу. Дальше организуется управление действием, во время которого переключаются ключи, составляющие схему с питающим напряжением. Крайнее идёт с блока питания, на двигатель, проходя по ключам.

Доп советы по выбору
Максимум по току требуемого напряжения, идущего к выводам – основной фактор, на основании которого следует созодать выбор. Ток, выдаваемый драйвером, быть может последующих типов:
- Таковой же, что потребляет двигатель.
- Выше, чем упомянутое ранее значение.
Желаемые характеристики по начальному напряжению выбираются с помощью особых переключателей.
Шаговые движки могут иметь разный порядок подключения. Обычно он зависит от того, каким количеством проводов снабжён привод. Нужно направить внимание и на предназначение устройства. На рынке выпускается огромное количество моделей, и фактически у каждой употребляется собственный вариант подключаемой схемы. Снутри располагается до 4-6 проводов. Биполярные модули сопровождают стандартно конкретно варианты с 4-мя проводами.
Любые две обмотки идут с 2-мя приводами. Необходимо употреблять обыденный метр, чтоб не допустить ошибок. Шестипроводные движки различаются наибольшей мощностью. Это означает, что любая обмотка сопровождается 2-мя проводами и одним центр-краном. Такие аппараты допускают два вида соединений:
- С биполярными аппаратами.
- С униполярными моделями.
Для разделения проводов так же используются приборы измерения. Однополярные устройства подразумевают, что употребляются все 6 проводов. В случае с биполярными можно взять всего один центральный кран совместно с проводами по одной обмотке.
Что ещё учитывать?
Центр-краном именуют обыденный провод. Ещё для него употребляют обозначения «центральный», «средний». Часть моделей шаговых движков снабжаются схожими приспособлениями. Любая обмотка идёт вместе с 3-мя проводами, когда речь идёт о униполярных вариантах. Два из их организуют соединение с транзисторами. Центр-кран либо средний идёт вплоть до источника питания либо напряжения.

Два боковых провода совершенно можно игнорировать, если транзисторы употреблять не планируется.
5- и шестипроводные модели почти во всем похожи друг на друга. Но снутри центральные провода выводятся в один общий кабель, совместно с остальными составляющими. Обмотки не получится соединить вместе, если будут отсутствовать разрывы. Идеальнее всего конкретно средний провод соединять с иными проводниками. Тогда о эффективности и сохранности устройства можно будет не беспокоиться. Необходимо просто брать пригодные детали.
Заключение
Подобрать пригодную модель мотора для станка будет проще, если заблаговременно изучить главные свойства, а так же предложения на соответственном рынке. Основное – обращаться к поставщикам, которые заслуживают доверия. Мельчайший брак и ошибка приведут к выходу из строя очень дорогостоящих деталей.



























