Как можно регулировать обороты асинхронного двигателя: обзор методов
Благодаря надежности и простоте конструкции асинхронные движки (АД) получили обширное распространение. В большинстве станков, промышленном и бытовом оборудовании используются электродвигатели такового типа. Изменение скорости вращения АД делается механически (доборной перегрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) либо электронными методами. Электронное регулирование наиболее сложное, да и еще наиболее комфортное и всепригодное.

Для почти всех агрегатов применяется конкретно электронное управление. Оно обеспечивает четкое и плавное регулирование запуска и работы двигателя. Электронное управление делается за счет:
- конфигурации частоты тока;
- силы тока;
- уровня напряжения.
В данной статье мы разглядим пользующиеся популярностью методы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько методов:
- Управление вращением за счет конфигурации электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения либо роста напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В этом случае регулировка делается при помощи присоединенного к движку устройства для преобразования частоты. Для этого используются массивные тиристорные преобразователи. Процесс частотного регулирования можно разглядеть на примере формулы ЭДС трансформатора:
Данное выражение значит, что для сохранения неизменного магнитного потока, значащего сохранение перегрузочной возможности электромотора, следует сразу с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
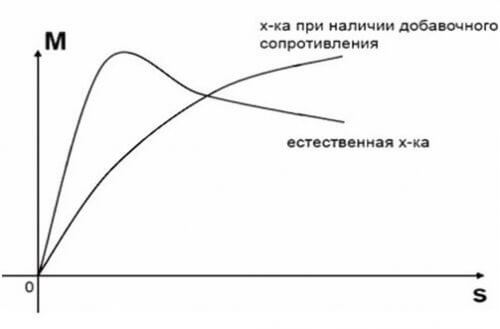
то это значит, что критичный момент не изменен. А механические свойства соответствуют рисунку ниже, если вы не осознаете, что значат эти свойства, то в этом случае регулировка происходит без утраты мощности и момента.

Плюсами данного способа являются:
- плавное регулирование;
- изменение скорости вращения ротора в огромную и наименьшую сторону;
- твердые механические свойства;
- экономичность.
Недочет один — необходимость в частотном преобразователе, т.е. повышение цены механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в спектре 100-150 баксов, что не очень недешево для настоящей регулировки привода станков в личной мастерской.
Переключение числа пар полюсов
Данный способ применяется для многоскоростных движков со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое обширное применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего разглядеть на базе двухскоростного АД. В таковой машине обмотка каждой фазы состоит из 2-ух полуобмоток. Скорость вращения меняется при подключении их поочередно либо параллельно.

В четырехскоростном электродвигателе обмотка выполнена в виде 2-ух независящих друг от друга частей. При изменении числа пар полюсов первой обмотки делается изменение скорости работы электромотора с 3000 до 1500 оборотов за минуту. С помощью 2-ой обмотки делается регулировка вращения 1000 и 500 оборотов за минуту.
При изменении числа пар полюсов происходит и изменение критичного момента. Для его сохранения постоянным, требуется сразу с конфигурацией числа пар полюсов регулировать и питающее напряжение, к примеру, переключением схемы звезда-треугольник и их вариантами.
Плюсы данного способа:
- твердые механические свойства двигателя;
- высочайший КПД.
- ступенчатая регулировка;
- большенный вес и габаритные размеры;
- высочайшая стоимость электромотора.
Методы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором делается методом конфигурации скольжения. Разглядим главные варианты и методы.
Изменение питающего напряжения
Этот метод также применяется для АД с КЗ ротором. Асинхронный движок подключается через автотрансформатор либо ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.

Но таковой режим уменьшает перегрузочную способность двигателя. Этот метод применяется для регулирования в границах напряжения не выше номинального, потому что повышение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного способа в цепь ротора подключается реостат либо набор неизменных резисторов большенный мощности. Данное устройство создано для плавного роста сопротивления.
Скольжение вырастает пропорционально повышению сопротивления, а скорость вращения вала электромотора при всем этом понижается.
- большенный спектр регулирования в сторону снижения скорости вращения.
- понижение КПД;
- повышение утрат;
- ухудшение механических черт.
Асинхронный вентильный каскад и машинки двойного питания
Изменение скорости работы асинхронных электромоторов в данных вариантах производится методом конфигурации скольжения. При всем этом скорость вращения электромагнитного поля неизменна. Напряжение подается впрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует дополнительную ЭДС. Такие способы употребляются лишь в особых машинках и больших промышленных устройствах.

Плавный запуск асинхронных электродвигателей
АД не считая бесспорных преимуществ, владеют существенными недочетами. Это рывок на старте и огромные пусковые токи, в 7 раз превосходящие номинальные. Для мягенького старта электродвигателя употребляются последующие способы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- внедрение специализированных устройств для плавного запуска.
В большинстве частотных регуляторов есть функция плавного запуска двигателя. Это не только лишь понижает пусковые токи, да и уменьшает перегрузки на исполнительные механизмы. Потому регулирование частоты и плавный запуск достаточно очень соединены меж собой.
Как создать устройство для конфигурации скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно применять диммеры. Но этот метод ненадежен и владеет суровыми недочетами: понижением КПД, суровым перегревом устройства и угрозой повреждения двигателя.
Для надежного и высококачественного регулирования оборотов электродвигателей на 220В, идеальнее всего подступает частотное регулирование.
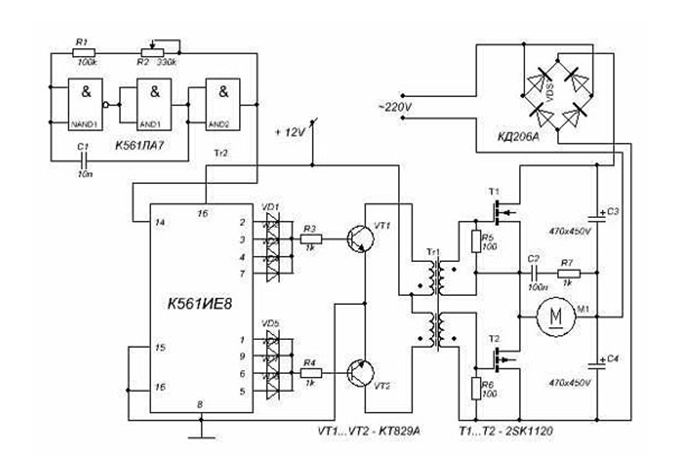
Приведенная ниже схема дозволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения делается в границах от 1000 до 4000 оборотов за минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 делает развязку верхнего и нижнего транзисторов полумоста.

Демпфирующая цепь С4, R7 гасит всплески напряжения небезопасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, содержит в себе диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, любая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки нужно очень накрепко заизолировать друг от друга, потому что разница потенциалов меж ними доходит до 640 В. Подключение выходных обмоток к затворам ключей делается в противофазе.
Вот мы и разглядели методы регулировки оборотов асинхронных движков. Если появились вопросцы, задавайте их в комментах под статьей!
Методы регулировки оборотов вращения асинхронных движков
Довольно нередко режим работы вспомогательного механизированного оборудования просит снижения штатных частот вращения. Достигнуть такового эффекта дозволяет регулировка оборотов асинхронного двигателя. Как это создать своими руками (расчет и сборку), используя обычные схемы управления либо самодельные устройства, попробуем разобраться дальше.
Что такое асинхронный движок?
Электродвигатели переменного тока отыскали достаточно обширное применение в разных сферах нашей жизнедеятельности, в подъемно транспортном, обрабатывающем, измерительном оборудовании. Они употребляются для перевоплощения электронной энергии, которая поступает от сети, в механическую энергию вращающегося вала. Почаще всего употребляются конкретно асинхронные преобразователи переменного тока. В их частота вращения ротора и статора различаются. Меж этими активными элементами обеспечивается конструктивный воздушный зазор.
И статор, и ротор имеют твердый сердечник из электротехнической стали (наборного типа, из пластинок), выступающий в роли магнитопровода, также обмотку, которая укладывается в конструктивные пазы сердечника. Конкретно метод организации либо укладки обмотки ротора является главным аспектом систематизации этих машин.
Движки с короткозамкнутым ротором (АДКР)
Тут употребляется обмотка в виде дюралевых, медных либо латунных стержней, которые вставляются в пазы сердечника и с обеих сторон замыкаются дисками (кольцами). Тип соединения этих частей зависит от мощности двигателя: для малых значений употребляют способ совместной отливки дисков и стержней, а для огромных – раздельное изготовка с следующей сваркой меж собой. Обмотка статора подключается с внедрением схем «треугольника» либо «звезды».

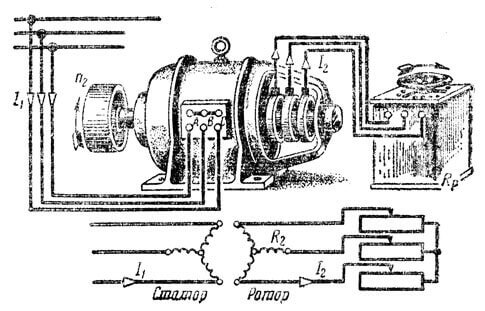
Движки с фазным ротором
К сети подключается трехфазная обмотка ротора, средством контактных колец на основном валу и щеток. За базу принимается схема «звезда». На рисунке понизу представлена обычная система такового двигателя.

Механизм работы и число оборотов асинхронных движков
Данный вопросец разглядим на примере АДКР, как более всераспространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, любая из 3-х фаз которой смещена геометрически на 120°. Опосля подачи напряжения возникает магнитное поле, создающее методом индукции ЭДС и ток в обмотках ротора. Крайнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а конкретно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из главных черт хоть какого АДКР является частота вращения, расчет которой можно вести по последующей зависимости:
n = 60f / p, о/мин
где f – частота сетевого напряжения, Гц (единица частоты периодических процессов в Международной системе единиц СИ), р – число полюсных пар статора.
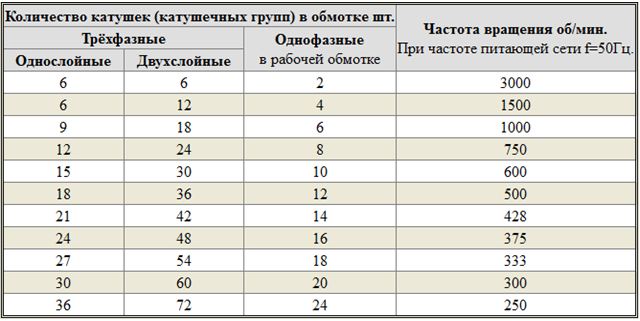
Все технические свойства указываются на железной табличке, закрепленной на корпусе. Но если она отсутствует по некий причине, то найти число оборотов необходимо вручную по косвенным показателям. Обычно, употребляется три главных способа:
- Расчет количества катушек. Приобретенное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения употребляется формула вида:
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – фактически, шаг укладки обмотки.
Обычные значения оборотов:

- Расчет числа полюсов по сердечнику статора. Употребляются математические формулы, где учитываются геометрические характеристики изделия:
2p = 0,35Z1b / h либо 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний поперечник, образованный зубцами сердечника, см.
Опосля этого по приобретенным данным и магнитной индукции необходимо найти количество витков, которое сверяется с паспортными данными движков.
Методы конфигурации оборотов двигателя
Регулировка оборотов хоть какого трехфазного электродвигателя, применяемого в подъемно-транспортной технике и оборудовании, дозволяет достигнуть требуемых режимов работы буквально и плавненько, что далековато не постоянно может быть, к примеру, за счет механических редукторов. На практике употребляется семь главных способов корректировки скорости вращения, которые делятся на два главных направления:
- Изменение скорости магнитного поля в статоре. Получается из-за частотного регулирования, переключения числа полюсных пар либо корректировки напряжения. Следует добавить, что эти способы применимы для электродвигателей с короткозамкнутым ротором,
- Изменение величины скольжения. Этот параметр можно откорректировать за счет питающего напряжения, подключения доп сопротивления в электронную цепь ротора, внедрения вентильного каскада либо двойного питания. Употребляется для моделей с фазным ротором.
Более нужными способами являются регулирование напряжения и частоты (за счет внедрения преобразователей), также изменение количества полюсных пар (реализуется методом организации доборной обмотки с возможностью переключения).
Обычные схемы регуляторов оборотов
На рынке сейчас есть широкий выбор регуляторов и частотных преобразователей для асинхронных движков. Тем не наименее, для бытовых нужд подъемного либо обрабатывающего оборудования полностью можно создать расчет и сборку на микросхеме самодельного устройства на базе тиристоров либо массивных транзисторов.
Ниже представлен пример схемы довольно массивного регулятора для асинхронного двигателя. За счет чего же можно достигнуть плавного контроля характеристик его работы, понижения энергопотребления до 50%, расходов на техническое сервис.
Данная схема является сложной. Для бытовых нужд ее можно существенно упростить, используя в качестве рабочего элемента симистор, к примеру, ВТ138-600. В этом случае схема будет смотреться последующим образом:
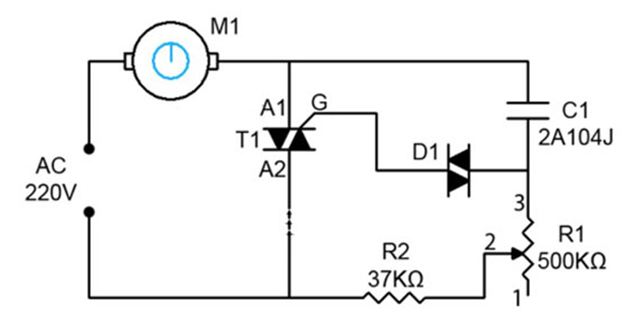
Обороты электродвигателя будут регулироваться за счет потенциометра, который описывает фазу входного импульса, открывающего симистор.
Как можно судить из инфы, представленной выше, от оборотов асинхронного двигателя зависят не только лишь характеристики его работы, да и эффективность функционирования питаемого подъемного либо обрабатывающего оборудования. В торговой сети сейчас можно приобрести самые различные регуляторы, но также можно совершить расчет и собрать действенное устройство своими руками.
Частотный регулятор скорости для асинхронного двигателя
Регулировка скорости конфигурацией величины напряжения понижает момент и также наращивает утраты мощности. Регулировка частоты вращения методом конфигурации числа полюсов осуществляется ступенчато, не считая того, этот метод подходящ лишь для особых многоскоростных движков с несколькими обмотками недвижной части.
Асинхронный движок – самый всераспространенный электропривод технологического оборудования. Основная изюминка таковых электронных машин – неизменная скорость вращения вала. Ее регулировку производят:
- Механическим методом. Для этого вал подключают к редукторам, муфтам и иным устройствам.
- Методом конфигурации числа пар полюсов, величины либо частоты питающего напряжения обмоток статора.
Механическое регулирование усложняет кинематическую схему электропривода, ведет к потерям мощности и нерациональному расходу электроэнергии.
Более многообещающий способ регулирования уголовной скорости ротора – преобразование частоты питающего напряжения. Этот метод обеспечивает сохранение механических черт во всем спектре и владеет рядом остальных преимуществ.
Устройство и механизм работы частотного регулятора
Принцип частотного регулирования основан на зависимости угловой скорости вращения ротора от частоты напряжения на обмотках статора. С возникновением IGBT-транзисторов и GTO-тиристоров наибольшее распространение получила схема преобразования частоты на базе широтно-импульсного модулятора.
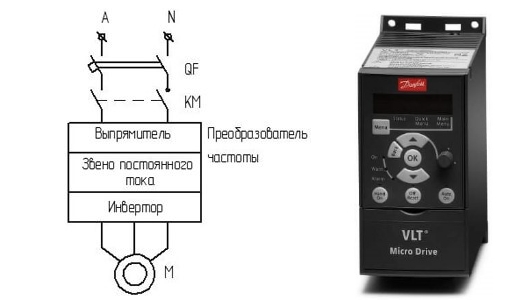
Такие преобразователи частоты состоят:
- Из силового выпрямителя с С либо LC фильтром для выравнивания пульсаций.
- Из инвертора на IGBT-транзисторах для преобразования неизменного напряжения в переменное, данной частоты и амплитуды.
- Из блока управления для генерации отпирающих силовые транзисторы импульсов.
Переменное напряжение выпрямляется и преобразуется в неизменное, потом опять инвертируется в переменное. Частота на силовом выходе ПЧ определяется продолжительностью отпирающих силовые транзисторы импульсов, поступающих со схемы управления.
Таковой метод регулирования дозволяет изменять частоту и амплитуду напряжения в силовой цепи электродвигателя, а означает управлять скоростью вращения ротора и моментом на валу электронной машинки.
Структура частотного регулятора
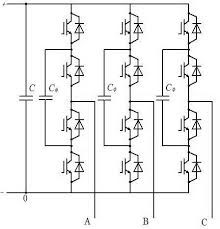
Большая часть частотных преобразователей для электродвигателей до 690 В выполнены по схеме двухуровневых инверторов напряжения. Они разрешают моделировать напряжение питания нужной формы, амплитуды частоты. Такие устройства состоят из неуправляемого выпрямителя, 2-х транзисторных ключей на каждую фазу и конденсатора. Выходное напряжение содержит высшие гармоники, которые сглаживаются индуктивной перегрузкой. Особые фильтры используют относительно изредка.
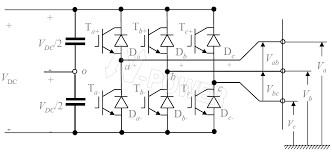
К недочетам таковой схемы является ограничение величины выходного напряжения, которое определяется наибольшим напряжением полупроводниковых устройств.
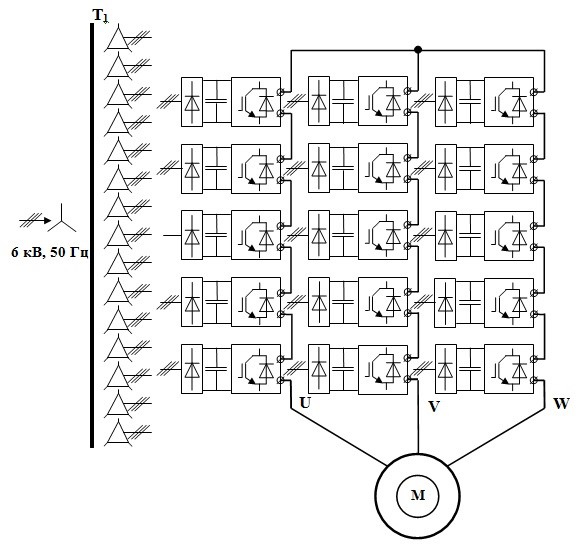
Для высоковольтных приводов употребляются многоуровневые схемы регулирования. Они состоят из нескольких однофазных инверторов, соединенных поочередно. Таковая схема дозволяет избежать резонансов, обеспечивает высочайшее быстродействие, понижает скорость нарастания напряжения. Такие ПЧ имеют модульную систему. При выходе из строя одной из ячеек, ее просто поменять. К недочетам данной схемы относятся необходимость отдельного источника питания для всякого модуля, функции которого делает трансформатор специального предназначения.
Преобразователи частоты с плавающими конденсаторами разрешают обойтись без входного трансформатора и наращивать число ячеек зависимо от требуемой мощности. Такое решение обеспечивает понижение высших гармоник, уменьшает скорость нарастания напряжения.
Для регулировки скорости электродвигателей с повторно-кратковременным режимом работы частыми реверсами используют инверторы тока. Эти устройства представляют собой управляемый выпрямитель и инвертор на тиристорах. Для уменьшения помех в цепи перегрузки в схему врубается расщепленный индуктивный фильтр. Выходное напряжение таковых устройств имеет форму аппроксимированной синусоиды. Для выравнивания его формы непременно включение перед электродвигателем конденсаторов. Основное достоинство таковых ПЧ – возможность рекуперации электроэнергии назад в электросеть.
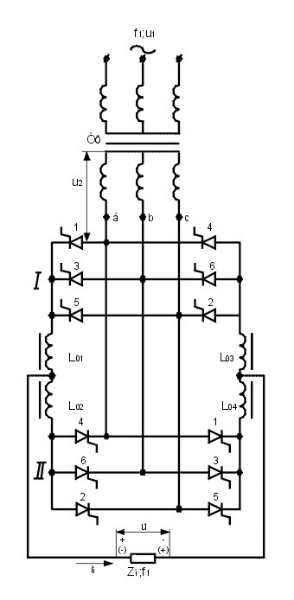
Прямые преобразователи частоты не содержат конденсаторов. Основное их преимущество – маленькие габариты и значимая мощность перегрузки. Такие устройства употребляются в составе массивных электроприводов работающих на низких скоростях. ПЧ этого типа выполнены на базе тиристорных преобразователей. На входе прямых ПЧ установлен фазосдвигающий трансформатор, устраняющий низшие гармоники и выполняющий функцию источника питания для всякого преобразователя. Прямые ПЧ требуют сложной схемы управления.
Состав частотных преобразователей
Не считая выпрямителя, ШИМ-модулятора и инвертора, в состав частотного преобразователя входят:
Устройство для ввода данных и обмена информаций с ПК (Персональный компьютер — компьютер, предназначенный для эксплуатации одним пользователем), иными частотными преобразователями.
- Интегрированная энергонезависимая память. В этом устройстве фиксируются аварийные отключения, конфигурации опций, также остальные данные.
- Управляющий контроллер, обеспечивающий реализацию алгоритмов управления, обработку данных с датчиков, защитное отключение при ненормальных режимах работы.
- ЭМ-фильтр. Это устройство обеспечивает понижение реактивной частотной составляющей, снижающей свойство электроэнергии и негативно влияющей на работу электродвигателя.
- Вентилятор и радиатор для принудительного остывания и отвода тепла силовых транзисторов.
- Тормозной прерыватель и остальные элементы.
Не считая аппаратной части, преобразователи частоты содержат программное обеспечение. Контроллеры с открытой логикой разрешают заносить конфигурации в обычное ПО (то есть программное обеспечение — комплект программ для компьютеров и вычислительных устройств), поставляемое производителем, и без помощи других программировать ПЧ.
Однофазные преобразователи частоты
Однофазные асинхронные электродвигатели обширно используются в качестве приводов насосных агрегатов, вентиляторов, маломощных станков. Для регулирования частоты вращения этих электронных машин используются 2 главных метода:
- Изменение величины напряжения питания.
- Изменение частоты питающего напряжения.
Для регулирования питающего напряжения используются трансформаторные, автотрансформаторные, тиристорные, симисторные и транзисторные преобразователи. Изменение частоты вращения методом регулирования напряжения имеет ряд суровых недочетов:
- Повышение скольжения и мощный нагрев обмоток статора.
- Узенький спектр регулирования.
Не считая того, неизменная составляющая питающего напряжения на выходе тиристорных и симисторных устройств вызовает повышение шума при работе, рывки и остальные ненужные явления.
Частотное регулирование лишено этих недочетов. Однофазные ПЧ используются в холодильном оборудовании, системах вентиляции, бытовых насосах.
Такие электроприводы обеспечивают:
- Размеренную работу однофазного двигателя при хоть какой частоте вращения.
- Понижение употребления электроэнергии.
- Возможность автоматической регулировки частоты вращения с оборотной связью по изменению 1-го либо нескольких технологических характеристик.
- Удаленное управление и контроль черт.
- Защиту от ненормальных режимов работы и маленьких замыканий.
- Умственное управление электродвигателем в согласовании с данным методом.
- Возможность запуска без фазосдвигающего элемента.
- Поддержание нужного момента на валу во всем спектре конфигурации скорости.
Не считая базисных составляющих, в состав однофазного преобразователя частоты входят ПИД-регулятор, ПЛК-контроллер, устройство для обмена данными с удаленным оборудованием, пульт дистанционного управления. При внедрении доп опций допустимо применение трехфазного ПЧ для однофазных движков переменного тока.

Таковым образом, управление однофазными и трехфазными асинхронными электродвигателями методом конфигурации частоты существенно превосходит способ регулирования величины напряжения, механические методы.



























